




I. Introduction▲
Ce tutoriel s'intûˋresse û prûˋsenter ROS (Robot Operating System) et û dûˋcrire comment proposer û un dûˋveloppeur un environnement de dûˋveloppement prûˆt û l'emploi quel que soit le systû´me d'exploitation utilisûˋ pour le dûˋveloppement et pour le dûˋploiement. En effet, par dûˋfaut, ROS n'est disponible que sous un systû´me Linux. Il existe bien des versions pour macOS, mais elles sont expûˋrimentales et il n'existe aucune version pour Windows. Par ailleurs, mûˆme si nous souhaitions utiliser ces versions expûˋrimentales, aurions-nous le mûˆme comportement une fois notre programme dûˋployûˋô ? Bien entendu, si du matûˋriel doit ûˆtre utilisûˋ spûˋcifiquement (bras robotisûˋ, carte RaspberryãÎ) pour un systû´me d'exploitation donnûˋ (gûˋnûˋralement sous Linux), nous n'aurions pas le choix d'utiliser le systû´me en question.
Notre proposition s'appuie massivement sur l'utilisation de Docker pour crûˋer des conteneurs basûˋs sur des images Docker ROS. Ces images Docker ROS existent et sont officiellesô : https://hub.docker.com/_/ros/. Toutefois, l'usage de ces images n'est pas mis en avant par les diffûˋrentes documentations. De plus, il peut ûˆtre difficile de combiner Docker et ROS pour un dûˋveloppeur ne maûÛtrisant pas forcûˋment les deux technologies.
Le plan de ce tutoriel est le suivant. Dans une premiû´re section, nous prûˋsenterons ROS et les concepts sous-jacents. Dans une deuxiû´me section, nous dûˋtaillerons la construction d'une image Docker ROS personnalisûˋe. Dans une troisiû´me section, nous utiliserons cette image Docker ROS dans un cadre de dûˋveloppement via l'exemple simpleô : Publieur/Consommateur. Dans une quatriû´me section, nous partirons d'un exemple plus complexe, celui de la tortue, afin de montrer que notre proposition peut supporter des programmes avec des fenûˆtres graphiques (via le dûˋport d'affichage). Les exemples Publieur/Consommateur et Tortue sont des exemples pûˋdagogiques, nous programmerons dans une derniû´re section un exemple plus adaptûˋ û ROS en utilisant des cartes Raspberry Pi. Finalement, nous conclurons et donnerons un aperûÏu du prochain tutoriel.
Pour ce premier tutoriel, nous allons nous limiter û la communication entre néuds via l'utilisation de topics. Par ailleurs, bien que ROS supporte plusieurs langages, nous allons ûˋgalement nous limiter û un seul langage qui sera Python. Pas d'inquiûˋtude, le code sera simple, l'objectif visûˋ n'est pas d'apprendre un nouveau langage, mais montrer comment utiliser ROS avec Docker.
II. Introduction ROS▲
ROS pour Robot Operating System est un ensemble de briques logicielles permettant le dûˋveloppement d'applications pour le domaine de la robotique. La signification de son acronyme peut porter û confusion, car il ne s'agit pas vraiment d'un systû´me d'exploitation. En effet, pour utiliser ROS il est nûˋcessaire de disposer d'un systû´me existant en l'occurrence Linux.
En termes de fonctionnalitûˋs ROS propose une abstraction du matûˋriel, une gestion de la concurrence, une gestion des processus, une transmission de messages synchrones ou asynchrones dans une architecture de communication interprocessus et intermachine. ROS fournit ûˋgalement un kit de dûˋveloppement logiciels (SDK) pour faciliter le dûˋveloppement d'applications basûˋes sur ROS. Nous retrouvons tout d'abord des outils pour crûˋer, exûˋcuter et dûˋployer des applications ROS. Nous retrouvons ensuite des API pour dûˋvelopper des programmes avec les langages de dûˋveloppement officiels C++ et Python. Il existe ûˋgalement une API pour le dûˋveloppement d'applications ROS avec le langage Java. L'initiative avait ûˋtûˋ poussûˋe afin de pouvoir exûˋcuter des applications ROS sous le systû´me d'exploitation Android. Il est û noter que l'utilisation du langage Java avec ROS fera l'objet d'un second tutoriel. Enfin, ROS fournit un systû´me de packages permettant de distribuer des composants dûˋveloppûˋs pour ROS. Ce systû´me de package permet de rûˋutiliser des dûˋveloppements rûˋalisûˋs par la communautûˋ ROS.
Dans la suite de cette section, nous allons prûˋsenter rapidement la structuration de ROS en prûˋsentant les concepts clûˋs û savoirô : node, Master, message, topic et service. Nous terminerons par la prûˋsentation du systû´me de fichiers via la notion de workspace et de package.
II-A. Nodeô : néud▲
Un néud ou Node en anglais est un processus qui effectue une opûˋration. Il peut s'agir d'extraire les informations d'un capteur, de contrûÇler un moteur, de capturer des images û partir d'une camûˋra, d'exûˋcuter un algorithme, d'afficher une interface graphique pour la visualisation de donnûˋesãÎ Le contenu d'un néud est dûˋveloppûˋ dans un langage de programmation supportûˋ par ROS, actuellement C++, Python ou Java.
Lors du dûˋmarrage d'un néud, celui-ci s'identifie auprû´s du Master. L'architecture utilisûˋe par ROS s'appuie sur un rûˋseau Point û Point (peer to peer). Ainsi, les néuds communiquent avec d'autres néuds via les topics (communication asynchrone) ou via les services (communication synchrone).
II-B. Master▲
Le Master est un service ROS qui permet de dûˋclarer des néuds (comme pour un annuaire) et de notifier des néuds que des changements dans le systû´me ont ûˋtûˋ rûˋalisûˋs. La dûˋclaration d'un néud vers le Master se fait lors de la crûˋation du néud. Le Master est donc un intermûˋdiaire qui permet û des néuds de se connaûÛtre et de pouvoir communiquer entre eux.
Dans une architecture intermachine oû¿ des néuds doivent communiquer ensemble, certaines restrictions rûˋseaux sont nûˋcessaires.
- Chaque néud doit ûˆtre identifiûˋ par un nom que tous les autres néuds peuvent identifier.
- Comme il y a une communication bidirectionnelle entre les néuds, tous les ports d'une machine doivent ûˆtre ouverts. L'attribution du numûˋro de port pour communiquer vers un néud donnûˋ se fait par le Master, et c'est lui qui informe les néuds du port d'ûˋcoute. Le choix du port d'ûˋcoute n'est pas libre, il est imposûˋ par le Master.
II-C. Topic▲
Le topic est un mûˋcanisme de communication asynchrone entre des néuds connu sous le nom de Lecteur/ûcrivain ou Publisher/Subscriber en anglais. Il fonctionne sur le principe d'un bus de messages auquel un ou plusieurs néuds (ûcrivains) pourront publier de l'information et oû¿ un ou plusieurs néuds (Lecteurs) pourront lire de l'information. Les donnûˋes qui transitent û travers le topic sont typûˋes et dûˋclarûˋes û travers des messages.
La figure ci-dessous rûˋsume le processus complet de communication û base de topics suivant trois ûˋtapes.
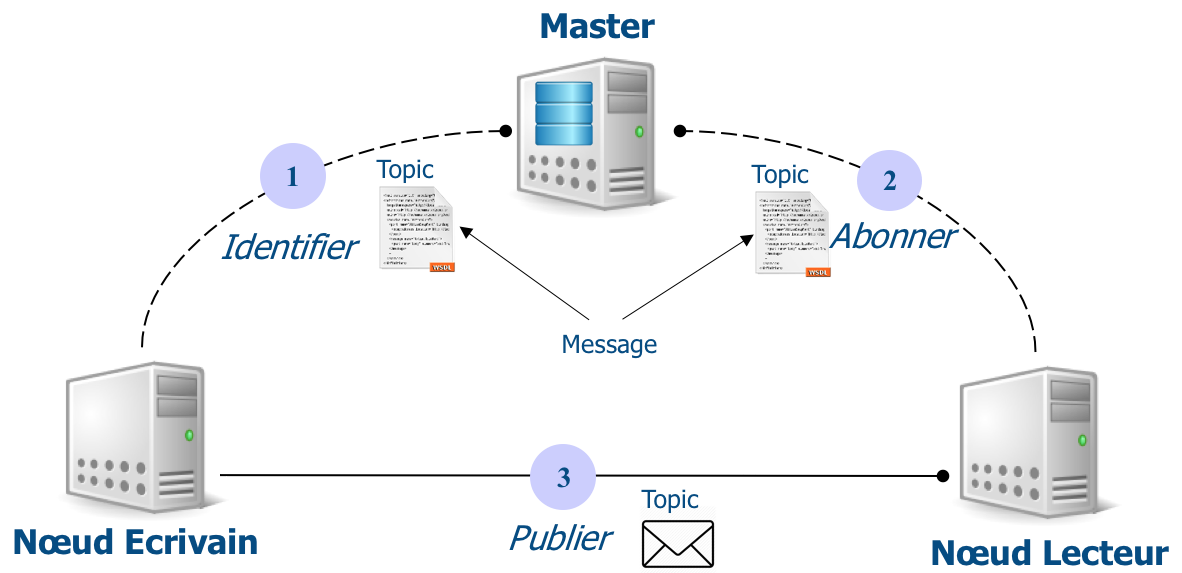
- Un néud ûcrivain se dûˋclare auprû´s du Master pour lui indiquer qu'il souhaite publier dans un topic avec un type de Message donnûˋ (phase 1ô : Identifier).
- Un néud Lecteur se dûˋclare auprû´s du Master pour lui indiquer qu'il souhaite s'abonner û un topic avec un type de Message donnûˋ (phase 2ô : Abonner).
- Le Master avertit le néud ûcrivain que le néud Lecteur s'est abonnûˋ au topic qu'il a publiûˋ. Une connexion s'ûˋtablit entre le néud ûcrivain et le néud Lecteur. Le néud ûcrivain publie des donnûˋes vers le néud Lecteur en respectant le type de Message dûˋfini lors de la dûˋclaration (phase 3ô : Publier).
II-D. Service▲
Le service est un mûˋcanisme de communication synchrone uniquement entre deux néuds identifiûˋs comme Fournisseur (le néud qui fournit le service) et Consommateur (le néud qui consomme le service).
La figure ci-dessous rûˋsume le processus complet de communication û base de service.

- Un néud Fournisseur se dûˋclare au Master pour lui indiquer qu'il souhaite publier un service en prûˋcisant un nom et un message (phase 1ô : Publier).
- Un néud Consommateur se dûˋclare au Master pour lui indiquer qu'il souhaite consommer un service avec un nom donnûˋ (phase 2ô : Chercher). La signature du service û consommer est dûˋjû connue par le Consommateur.
- Une connexion est ûˋtablie entre le Fournisseur et le Consommateur via l'intermûˋdiaire du Master. Le néud Consommateur invoque le service en respectant sa signature (phase 3ô : Consommer).
II-E. Message▲
Un message est une structure de donnûˋes utilisûˋe pour la communication entre des néuds (topic et service).
III. Prûˋrequis logiciel▲
Dans cette section sont listûˋs les diffûˋrents logiciels que nous utiliserons pour les expûˋrimentations. Ces expûˋrimentations se feront û partir de macOS High Sierra. Tous les outils listûˋs ci-dessous sont pratiquement multiplateformes, dans le cas contraire, nous donnerons des alternativesô :
- Dockerô : crûˋation de conteneur û partir d'image Dockerô ;
- DockerComposeô : outil de l'ûˋcosystû´me Docker pour crûˋer des orchestrations de conteneurs Dockerô ;
- DockerMachineô : outil pour crûˋer des machines Docker permettant de provisionner des Docker distantsô ;
- XQuartzô : le serveur X11 pour macOS pour afficher des interfaces graphiques sur le systû´me. Dans le cas de Windows, vous pouvez utiliser l'excellent outil MobaXterm qui intû´gre un serveur X11 et un client SSH ou alors le couple Putty et Xmingô ;
- Visual Studio Codeô : un ûˋditeur de texte.
IV. Construire une image Docker personnalisûˋe pour ROS▲
Pour conduire nos futures expûˋrimentations dans la suite de ce tutoriel, nous allons, dans cette section, prûˋparer une image Docker basûˋe sur l'image Docker ROS officielle (https://hub.docker.com/_/ros/). L'image Docker ROS officielle est utilisable en l'ûˋtat, voir la documentation officielle û ce sujetô : http://wiki.ros.org/docker/Tutorials/Docker. Toutefois, comme expliquûˋ dans la documentation, de nombreuses opûˋrations doivent se faire û l'intûˋrieur d'un conteneur. Par ailleurs, les donnûˋes gûˋnûˋrûˋes (workspace, fichiersãÎ) ne sont pas disponibles sur le systû´me hûÇte du dûˋveloppeur. Nous allons tenter d'apporter des solutions û ces problû´mes et rendre transparente l'utilisation de l'image ROS sur votre systû´me comme s'il avait ûˋtûˋ installûˋ nativement.
Nous commenûÏons par crûˋer un nouveau fichier Dockerfile qui permettra de construire une image Docker basûˋe sur l'image ROS officielle.
- Ouvrir un ûˋditeur de texte et saisir le code ci-dessous. Sauvegardez dans un fichier appelûˋ Dockerfile.
2.
3.
FROM ros:kinetic
COPY ./ros_entrypoint.sh /
Vous constatez que les modifications sont minimes. Nous avons juste apportûˋ une modification au fichier ros_entrypoint.sh dûˋjû prûˋsent sur l'image ROS officielle. Ce fichier ros_entrypoint.sh sera invoquûˋ û chaque fois que nous crûˋerons un nouveau conteneur basûˋ sur l'image ROS.
- Ouvrir un ûˋditeur de texte et saisir le code ci-dessous. Sauvegarder dans un fichier appelûˋ ros_entrypoint.sh situûˋ dans le mûˆme rûˋpertoire que le fichier Dockerfile.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
#!/bin/bash
set -e
# setup ros environment
source "/opt/ros/$ROS_DISTRO/setup.bash"
# setup workspace if it exists
if [ -n "$WORKSPACE_NAME" ]; then
if [ ! -e "/root/$WORKSPACE_NAME/devel/setup.sh" ]; then
previousDirectory=$(pwd)
cd /root/$WORKSPACE_NAME
catkin_make
cd $previousDirectory
fi
source "/root/$WORKSPACE_NAME/devel/setup.sh"
fi
exec "$@"
Nous avons apportûˋ des modifications û partir de la ligne 7. Ces modifications concernent l'initialisation de votre espace de travail (appelûˋ workspace) dans l'environnement ROS. Quand un workspace ROS est crûˋûˋ (identifiûˋ dans le script par la variable d'environnement WORKSPACE_NAME), il est nûˋcessaire d'invoquer la commande catkin_make (ligne 11). Cette commande permet de crûˋer deux rûˋpertoires dans votre workspace qui sont build/ et devel/. û l'intûˋrieur du rûˋpertoire devel/ se trouve plusieurs fichiers scripts dont un qui permet d'initialiser votre workspace dans l'environnement ROS. Sans l'invocation de ce script (ligne 12) les variables d'environnements ne seraient pas positionnûˋes sur votre workspace et par consûˋquent aucune commande ROS ne fonctionnerait. Vous pouvez consulter la documentation officielle pour plus de dûˋtailô : http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment#Create_a_ROS_Workspace.
- Ouvrir un terminal, se positionner dans le rûˋpertoire contenant les fichiers Dockerfile et ros_entrypoint.sh et exûˋcuter la commande suivante pour crûˋer une image Docker appelûˋe ros:mykineticô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
$ docker build --tag ros:mykinetic .
Sending build context to Docker daemon 469kB
Step 1/2 : FROM ros:kinetic
kinetic: Pulling from library/ros
d3938036b19c: Pull complete
a9b30c108bda: Pull complete
67de21feec18: Pull complete
817da545be2b: Pull complete
d967c497ce23: Pull complete
069aa2123770: Pull complete
2e3034c1bf7f: Pull complete
a8a977fd1bfb: Pull complete
97f33493d5be: Pull complete
e39d37c0ad49: Pull complete
7a1b27f0640b: Pull complete
97a49ac9bdcd: Pull complete
dc6b4c7fd4e4: Pull complete
Digest: sha256:392442dd953baeef86c747753060d1efa34e9a651ebe3ad0f2bc259aded90e9e
Status: Downloaded newer image for ros:kinetic
---> 4b2e99aadf55
Step 2/2 : COPY ./ros_entrypoint.sh /
---> 0cbcdc6508bf
Successfully built 0cbcdc6508bf
Successfully tagged ros:mykinetic
Dans un premier temps, l'image Docker ros:kinetic va ûˆtre tûˋlûˋchargûˋe depuis le registre DockerHub puis dans un second temps, notre image Docker sera construite par rapport aux indications du fichier Dockerfile.
- Assurons-nous que les images Docker correspondant û ROS soient prûˋsentes sur le systû´me. Depuis le terminal, saisir la commande suivanteô :
2.
3.
4.
5.
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros mykinetic f2aae4e9c1fa 3 minutes ago 1.18GB
ros kinetic 4b2e99aadf55 5 days ago 1.18GB
Nous constatons que les deux images sont prûˋsentes. La nûÇtre intitulûˋe ros:mykinetic et celle que nous avons tûˋlûˋchargûˋe ros:kinetic. Vous remarquerez que la taille des images est identique (1.18GB). Comme notre image Docker repose sur ros:kinetic, elle dispose de la mûˆme taille modulo les modifications mineures apportûˋes dans le fichier ros_entrypoint.sh.
V. Crûˋer des conteneurs basûˋs sur une image Docker ROSô : exemple Publieur/Consommateur▲
Dûˋsormais, notre image Docker ROS est crûˋûˋe. Nous allons pouvoir l'utiliser afin de mener un dûˋveloppement et une exûˋcution sans installer ROS nativement sur notre systû´me. Nous allons nous appuyer sur l'exemple Publieur/Consommateur pour illustrer l'utilisation de notre image Docker ROS.
L'exemple complet du Publieur/Consommateur est disponible û cette adresseô : http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29. Le principe est simpleô : un néud publie un message dans un topic et un autre néud consomme le message du topic et affiche le message sur la sortie console.
V-A. Initialisation du projet Publieur/Consommateur▲
Nous allons donc commencer par crûˋer un workspace pour contenir notre projet.
- Ouvrir un terminal, se placer dans un rûˋpertoire de travail par exemple ros (pas forcûˋment le mûˆme que pour la construction de l'image Docker) et exûˋcuter la commande suivante pour crûˋer le squelette du rûˋpertoire workspaceô :
$ mkdir -p workspace/src
Nous allons ensuite crûˋer un package qui portera le nom de l'exemple de la documentation officielle. La crûˋation de package avec ROS se fait û partir de l'outil catkin_create_pkg. Pour crûˋer un package beginner_tutorials quand ROS est installûˋ nativement sur votre systû´me, vous auriez fait comme celaô : $ catkin_create_pkg beginner_tutorials std_msgs rospy. Dûˋsormais, nous allons invoquer la mûˆme commande en utilisant notre image Docker ROS.
- Depuis le mûˆme terminal, saisir la ligne de commande suivanteô :
2.
$ docker run --rm -it -e WORKSPACE_NAME=workspace -v $(pwd)/workspace:/root/workspace -w /root/workspace/src ros:mykinetic catkin_create_pkg beginner_tutorials std_msgs rospy
... Sera dûˋtaillûˋ par la suite
Premier constat, cette commande est plus longue que la prûˋcûˋdente. Nous remarquons û la fin de cette longue commande le contenu suivant catkin_create_pkg beginner_tutorials std_msgs rospy qui est le mûˆme que la commande que nous aurions invoquûˋe sans Docker pour crûˋer un package. Dûˋcortiquons le reste de la nouvelle commande spûˋcifique û Dockerô : docker est l'outil pour crûˋer des conteneursô ; run indique qu'un conteneur doit ûˆtre crûˋûˋô ; --rm prûˋcise que le conteneur sera automatiquement dûˋtruit quand il s'arrûˆteraô ; -it permet d'utiliser le mode interactif sur le tty courant, en gros, sans cela nous n'aurions pas le retour du terminal et nous ne pourrions pas saisir de commandes supplûˋmentaires si besoinô ; -e WORKSPACE\_NAME=workspace crûˋe une variable d'environnement appelûˋe WORKSPACE\_NAME avec la valeur workspaceô ; -v $(pwd)/workspace:/root/workspace crûˋe un volume qui est un dossier partagûˋ de $(pwd)/workspace du systû´me hûÇte avec le dossier /root/workspace du conteneurô ; -w /root/workspace/src force le rûˋpertoire courant depuis le conteneur, toute interaction se fera depuis ce rûˋpertoireô ; enfin ros:mykinetic est le nom de l'image sur laquelle Docker se basera pour crûˋer le conteneur.
Dans la suite de nos expûˋrimentations, un patron de commande identique û celui-ci sera utilisûˋô : $ docker + OPTIONS_DOCKER + rosTool + OPTIONS_ROS. La premiû´re partie ne changera pratiquement jamais, seule rosTool + OPTIONS_ROS sera û adapter en fonction des actions û effectuer.
Avant de continuer, examinons le rûˋsultat de l'exûˋcution de la commande prûˋcûˋdenteô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
63.
$ docker run --rm -it -e WORKSPACE_NAME=workspace -v $(pwd)/workspace:/root/workspace -w /root/workspace/src ros:mykinetic catkin_create_pkg beginner_tutorials std_msgs rospy
Base path: /root/workspace
Source space: /root/workspace/src
Build space: /root/workspace/build
Devel space: /root/workspace/devel
Install space: /root/workspace/install
Creating symlink "/root/workspace/src/CMakeLists.txt" pointing to "/opt/ros/kinetic/share/catkin/cmake/toplevel.cmake"
####
#### Running command: "cmake /root/workspace/src -DCATKIN_DEVEL_PREFIX=/root/workspace/devel -DCMAKE_INSTALL_PREFIX=/root/workspace/install -G Unix Makefiles" in "/root/workspace/build"
####
-- The C compiler identification is GNU 5.4.0
-- The CXX compiler identification is GNU 5.4.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /root/workspace/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/kinetic
-- This workspace overlays: /opt/ros/kinetic
-- Found PythonInterp: /usr/bin/python (found version "2.7.12")
-- Using PYTHON_EXECUTABLE: /usr/bin/python
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /root/workspace/build/test_results
-- Found gmock sources under '/usr/src/gmock': gmock will be built
-- Looking for pthread.h
-- Looking for pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Found gtest sources under '/usr/src/gmock': gtests will be built
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.11
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /root/workspace/build
####
#### Running command: "make -j4 -l4" in "/root/workspace/build"
####
make: Warning: File 'Makefile' has modification time 8.3 s in the future
make[1]: Warning: File 'CMakeFiles/Makefile2' has modification time 9.2 s in the future
make[1]: warning: Clock skew detected. Your build may be incomplete.
make: warning: Clock skew detected. Your build may be incomplete.
/opt/ros/kinetic/setup.bash
Created file beginner_tutorials/package.xml
Created file beginner_tutorials/CMakeLists.txt
Created folder beginner_tutorials/src
Successfully created files in /root/workspace/src/beginner_tutorials. Please adjust the values in package.xml.
De la ligne 1 û 57, il s'agit de l'affichage du retour pour la construction du workspace. Pour rappel, l'outil catkin_make est invoquûˋ dans le fichier ros_entrypoint.sh û chaque crûˋation de conteneur ET si la construction du workspace courant n'avait jamais ûˋtûˋ faite. De la ligne 58 û la fin, il s'agit de l'affichage pour la crûˋation du package beginner_tutorials.
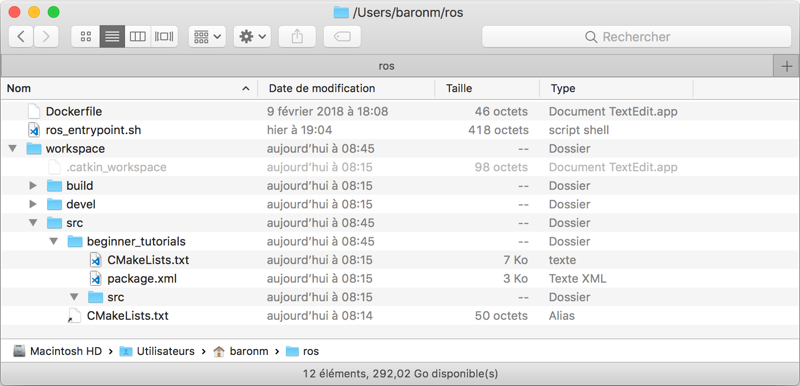
Observons les rûˋpertoires et fichiers depuis le rûˋpertoire workspace/.
2.
3.
4.
5.
6.
7.
8.
9.
workspace/
build/
devel/
src/
beginner_tutorials/
src/
CMakeLists.txt -- Fichier de compilation pour le package beginner_tutorials
package.xml -- Fichier de description du package beginner_tutorials
CMakeLists.txt -- Fichier de compilation pour tous les packages
Initialement le rûˋpertoire workspace/ ne contenait qu'un seul dossier vide src/. Nous constatons û la racine de workspace/ la prûˋsence des rûˋpertoires build/ et devel/. Pour rappel (voir section sur la construction d'une image Docker), ces rûˋpertoires servent û fournir des scripts prûˆts û l'emploi pour l'initialisation du workspace lorsque nous allons utiliser les diffûˋrents outils de ROS. Dans le rûˋpertoire src/ se trouve un rûˋpertoire beginner_tutorials qui correspond au rûˋsultat de la crûˋation d'un package par l'outil catkin_create_pkg.
û cette ûˋtape, notre environnement de dûˋveloppement est prûˆt û l'emploi, un workspace ROS a ûˋtûˋ initialisûˋ et un package a ûˋtûˋ crûˋûˋ. Sur le systû´me hûÇte (voir figure ci-dessous), nous disposons des rûˋpertoires et des fichiers pour dûˋposer nos codes sources.
V-B. Implûˋmentation de l'exemple Publieur/Consommateur▲
Le code Python du néud Publieur est donnûˋ ci-dessous (fichier talker.py)ô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
Une API Python appelûˋe rospy est importûˋe (ligne 3). Elle fournit des fonctions Publisher("chatter", String, queue_size=10) pour s'abonner au topic chatter (ligne 7). Le deuxiû´me paramû´tre String de cette fonction prûˋcise le type du message. Le troisiû´me paramû´tre queue_size prûˋcise la limite du nombre de messages dans la file d'attente du topic. Le nom du néud est remontûˋ au néud Master û partir de la fonction init_node (ligne 8). Le paramû´tre anonymous prûˋcise que le nom du néud doit ûˆtre unique dans le registre des noms. Pour cela, un numûˋro sera automatiquement ajoutûˋ au nom du néud. La frûˋquence d'ûˋmission du message dans le topic est rûˋalisûˋe par la fonction Rate (ligne 9). Elle prûˋcise dans cet exemple que le programme souhaite transmettre 10 messages par seconde si bien sû£r le temps de traitement (ligne 11 û 13) ne dûˋpasse pas 1/10e de seconde. Le message hello_str (construit û la ligne 11) est affichûˋ sur la console du néud (ligne 12) puis transmis au topic chatter (ligne 13).
- Crûˋer un fichier workspace/src/beginner_tutorials/talker.py et placer le contenu ci-dessus.
- Rendre le fichier workspace/src/beginner_tutorials/talker.py exûˋcutableô :
$ chmod +x workspace/src/beginner_tutorials/talker.py
Le code Python du consommateur est donnûˋ ci-dessous (fichier listener.py)ô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def listener():
# In ROS, nodes are uniquely named. If two nodes with the same
# node are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__ == '__main__':
listener()
La mûˆme API Python est importûˋe (ligne 2). Tout comme le code correspondant au néud Publieur, le nom du néud est remontûˋ au néud Master û partir de la fonction init_node (ligne 15). Le néud s'abonne au topic chatter et û chaque fois qu'un message est publiûˋ un callback nommûˋ callback est invoquûˋ (ligne 17). Un affichage du message est rûˋalisûˋ vers la console dans le code du callback (ligne 6).
- Crûˋer un fichier workspace/src/beginner_tutorials/listener.py et placer le contenu ci-dessus.
- Rendre le fichier workspace/src/beginner_tutorials/listener.py exûˋcutableô :
$ chmod +x workspace/src/beginner_tutorials/talker.py
V-C. Compilation du package de l'exemple Publieur/Consommateur▲
La compilation sous ROS consiste û construire un package (gûˋnûˋrer des fichiers spûˋcifiques aux messages et aux services) et s'assurer que les dûˋpendances entre les packages sont cohûˋrentes. Dans notre exemple trû´s simple qui n'utilise pas de services ni de messages spûˋcifiques autres que des chaûÛnes de caractû´res, la compilation ne va rien apporter. Toutefois, pour la suite de nos expûˋrimentations nous allons quand mûˆme montrer comment le rûˋaliser avec Docker.
- Depuis le mûˆme terminal (en vous assurant que vous ûˆtre placûˋ û la racine contenant le rûˋpertoire workspace), exûˋcuter la commande suivante qui va appeler l'outil catkin_makeô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
$ docker run --rm -it -e WORKSPACE_NAME=workspace -v $(pwd)/workspace:/root/workspace -w /root/workspace ros:mykinetic catkin_make
/opt/ros/kinetic/setup.bash
Base path: /root/workspace
Source space: /root/workspace/src
Build space: /root/workspace/build
Devel space: /root/workspace/devel
Install space: /root/workspace/install
####
#### Running command: "cmake /root/workspace/src -DCATKIN_DEVEL_PREFIX=/root/workspace/devel -DCMAKE_INSTALL_PREFIX=/root/workspace/install -G Unix Makefiles" in "/root/workspace/build"
####
-- Using CATKIN_DEVEL_PREFIX: /root/workspace/devel
-- Using CMAKE_PREFIX_PATH: /root/workspace/devel;/opt/ros/kinetic
-- This workspace overlays: /root/workspace/devel;/opt/ros/kinetic
-- Using PYTHON_EXECUTABLE: /usr/bin/python
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /root/workspace/build/test_results
-- Found gmock sources under '/usr/src/gmock': gmock will be built
-- Found gtest sources under '/usr/src/gmock': gtests will be built
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.11
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - beginner_tutorials
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'beginner_tutorials'
-- ==> add_subdirectory(beginner_tutorials)
-- Configuring done
-- Generating done
-- Build files have been written to: /root/workspace/build
####
#### Running command: "make -j4 -l4" in "/root/workspace/build"
####
En examinant le rûˋpertoire workspace/, nous constatons que le rûˋpertoire workspace/build contient un rûˋpertoire portant le nom du package. De mûˆme, dans workspace/devel plusieurs rûˋpertoires et fichiers ont ûˋtûˋ ajoutûˋs.
V-D. Exûˋcution de l'exemple Publieur/Consommateur▲
L'exûˋcution de l'exemple va consister û crûˋer un néud Master et deux néuds Publieur et Consommateur basûˋs sur le mûˆme package. Pour ces deux derniers néuds, un sera crûˋûˋ en exûˋcutant le code source dûˋcrit par le fichier talker.py et un autre sera crûˋûˋ en exûˋcutant le code source dûˋcrit par le fichier listener.py. Les deux néuds Publieur et Consommateur communiqueront via le néud Master.
Les trois néuds seront crûˋûˋs via des conteneurs Docker toujours basûˋs sur notre image Docker mykinetic. Comme les conteneurs reprûˋsentants les néuds Publieur et Consommateur devront communiquer avec le néud Master, les trois conteneurs devront faire parti du mûˆme sous-rûˋseau. Sous Docker, crûˋer un rûˋseau est la solution rûˋcente pour faire communiquer des conteneurs. L'utilisation de lien (option link) n'est plus recommandûˋe. Nous allons donc devoir crûˋer un rûˋseau sous Docker.
- Depuis un terminal, exûˋcuter la ligne de commande ci-dessousô :
2.
$ docker network create ros
9602c12e629a33ef27859fdaa13d0f9b4fa55ed8fc0eba30e7119837b8c129cb
- S'assurer que le rûˋseau a correctement ûˋtûˋ crûˋûˋ en exûˋcutant la commande suivanteô :
2.
3.
4.
5.
$ docker network ls
9e9c7638aaa2 bridge bridge local
4523411e4251 host host local
50afa90b1502 none null local
9602c12e629a ros bridge local
Pour l'exûˋcution de notre programme ROS, nous allons avoir besoin de trois terminaux ou si vous ûˆtes û l'aise vous pouvez utiliser tmux.
- Depuis un premier terminal, exûˋcuter la commande suivante qui va dûˋmarrer le néud Master û partir de l'outil roscoreô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
$ docker run --rm -it --net ros --name roscore ros:kinetic roscore
/opt/ros/kinetic/setup.bash
... logging to /root/.ros/log/1bc24550-4544-11e8-b32d-0242ac120002/roslaunch-81974c0026b0-1.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://81974c0026b0:36093/
ros_comm version 1.12.13
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.13
NODES
auto-starting new master
process[master]: started with pid [59]
ROS_MASTER_URI=http://81974c0026b0:11311/
setting /run_id to 1bc24550-4544-11e8-b32d-0242ac120002
process[rosout-1]: started with pid [72]
started core service [/rosout]
La commande Docker invoquûˋe est sensiblement identique aux prûˋcûˋdentes. Nous remarquons toutefois la prûˋsence de deux nouvelles options au niveau de Docker permettant d'une part de nommer explicitement un conteneur (--name roscore) et d'autre part d'indiquer qu'un conteneur fait partie d'un rûˋseau (--net ros). Ces options sont ûˋtroitement liûˋes et permettront aux deux autres néuds de communiquer avec le néud Master. L'option --name roscore permet de nommer le conteneur roscore. Ainsi pour accûˋder au conteneur relatif au néud Master depuis les deux autres conteneurs, il suffira de faire http://ros:11311.
- Depuis un deuxiû´me terminal, exûˋcuter la commande suivante qui va crûˋer le conteneur correspondant au néud Publieur (le conteneur sera nommûˋ talker) û partir de l'outil rosrunô :
2.
3.
4.
5.
6.
7.
8.
$ docker run --rm -it -e WORKSPACE_NAME=workspace --net ros --name talker -e ROS_MASTER_URI=http://roscore:11311 -v $(pwd)/workspace:/root/workspace -w /root/workspace ros:mykinetic rosrun beginner_tutorials talker.py
[INFO] [1519060948.447008]: hello world 1519060948.45
[INFO] [1519060948.549300]: hello world 1519060948.55
[INFO] [1519060948.649580]: hello world 1519060948.65
[INFO] [1519060948.750334]: hello world 1519060948.75
[INFO] [1519060948.848382]: hello world 1519060948.85
[INFO] [1519060948.950392]: hello world 1519060948.95
[INFO] [1519060949.049760]: hello world 1519060949.05
Deux options Docker sont spûˋcifiques û cette commande. La premiû´re est le nom du conteneur --name talker et la seconde est la dûˋfinition de la variable d'environnement ROS_MASTER_URI permettant d'indiquer comment le néud Publieur peut atteindre le néud Master. Pour revenir û l'outil rosrun (dernier paramû´tre de la commande Docker), il doit prûˋciser le nom du package et le programme û exûˋcuter.
En sortie de console, le néud Publieur ûˋmet toutes les 1/10e de seconde le message ô¨ô hello worldô ô£ sur le topic chatter et sur la console. Il nous reste donc û exûˋcuter le néud Consommateur pour extraire du topic chatter ce message et l'afficher sur la console.
- Depuis un troisiû´me terminal, exûˋcuter la commande suivante qui va crûˋer le conteneur correspondant au néud Consommateur (le conteneur sera nommûˋ listener) û partir de l'outil rosrunô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
$ docker run --rm -it -e WORKSPACE_NAME=workspace -e ROS_MASTER_URI=http://roscore:11311 --net ros --name listener -v $(pwd)/workspace:/root/workspace -w /root/workspace ros:mykinetic rosrun beginner_tutorials listener.py
[INFO] [1519060974.951692]: /listener_1_1519060974752I heard hello world 1519060974.95
[INFO] [1519060975.051022]: /listener_1_1519060974752I heard hello world 1519060975.05
[INFO] [1519060975.149728]: /listener_1_1519060974752I heard hello world 1519060975.15
[INFO] [1519060975.251297]: /listener_1_1519060974752I heard hello world 1519060975.25
[INFO] [1519060975.351836]: /listener_1_1519060974752I heard hello world 1519060975.35
[INFO] [1519060975.453088]: /listener_1_1519060974752I heard hello world 1519060975.45
[INFO] [1519060975.550020]: /listener_1_1519060974752I heard hello world 1519060975.55
[INFO] [1519060975.650819]: /listener_1_1519060974752I heard hello world 1519060975.65
[INFO] [1519060975.752685]: /listener_1_1519060974752I heard hello world 1519060975.75
Pas de grand changement par rapport û la commande permettant d'exûˋcuter le néud Publieur exceptûˋ le nom du conteneur --name listener et la commande associûˋe û rosrun.
En sortie console, le néud Consommateur affiche le message transmis par le topic chatter.
Comme on peut le constater, les trois néuds communiquent correctement ensemble. Vous trouverez ci-dessous une animation de ce que vous auriez dû£ obtenir sur les trois terminaux.
- Pour vûˋrifier que les conteneurs ont ûˋtûˋ crûˋûˋs et sont toujours en cours d'exûˋcution, affichez-les via la commande suivanteô :
2.
3.
4.
5.
$ docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
2625ffbb9490 ros:mykinetic "/ros_entrypoint.sh ãÎ" 12 seconds ago Up 11 seconds listener
fd84e3ae0ac8 ros:mykinetic "/ros_entrypoint.sh ãÎ" 19 seconds ago Up 18 seconds talker
13a48b2aa594 ros:mykinetic "/ros_entrypoint.sh ãÎ" 30 seconds ago Up 28 seconds roscore
V-E. Exûˋcution de l'exemple Publieur/Consommateur sans l'outil rosrun (solution alternative)▲
Dans la section prûˋcûˋdente, nous avons utilisûˋ l'outil rosrun pour crûˋer les deux néuds Publieur et Consommateur. Comme notre package ne dûˋpend pas d'autres packages et qu'il n'y a pas de message spûˋcifique (dûˋfinition de type complexe), nous pouvons dûˋmarrer les néuds via l'exûˋcution de programmes Python (outil python). Pour la suite des expûˋrimentations, assurez-vous que les conteneurs sont arrûˆtûˋs (un simple CTRL+C suffira).
- Depuis le premier terminal, dûˋmarrer le néud Master via la ligne de commande ci-dessousô :
2.
$ docker run --rm -it --net ros --name roscore ros:mykinetic roscore
...
- Depuis le deuxiû´me terminal, dûˋmarrer le néud Publieur via la ligne de commande ci-dessousô :
2.
3.
4.
5.
6.
7.
8.
9.
$ docker run --rm -it -e WORKSPACE_NAME=workspace -e ROS_MASTER_URI=http://roscore:11311 --net ros -v $(pwd)/workspace:/root/workspace -w /root/workspace/src/beginner_tutorials/src ros:mykinetic python talker.py
/opt/ros/kinetic/setup.bash
[INFO] [1524512900.033339]: hello world 1524512900.03
[INFO] [1524512900.134333]: hello world 1524512900.13
[INFO] [1524512900.234304]: hello world 1524512900.23
[INFO] [1524512900.334232]: hello world 1524512900.33
[INFO] [1524512900.434657]: hello world 1524512900.43
[INFO] [1524512900.536256]: hello world 1524512900.54
[INFO] [1524512900.634888]: hello world 1524512900.63
- Depuis le troisiû´me terminal, dûˋmarrer le néud Consommateur via la ligne de commande ci-dessousô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
$ docker run --rm -it -e WORKSPACE_NAME=workspace -e ROS_MASTER_URI=http://roscore:11311 --net ros -v $(pwd)/workspace:/root/workspace -w /root/workspace/src/beginner_tutorials/src ros:mykinetic python listener.py
/opt/ros/kinetic/setup.bash
[INFO] [1524512981.878919]: /listener_1_1524512981675I heard hello world 1524512981.88
[INFO] [1524512981.978380]: /listener_1_1524512981675I heard hello world 1524512981.98
[INFO] [1524512982.079724]: /listener_1_1524512981675I heard hello world 1524512982.08
[INFO] [1524512982.179340]: /listener_1_1524512981675I heard hello world 1524512982.18
[INFO] [1524512982.278469]: /listener_1_1524512981675I heard hello world 1524512982.28
[INFO] [1524512982.378678]: /listener_1_1524512981675I heard hello world 1524512982.38
[INFO] [1524512982.477874]: /listener_1_1524512981675I heard hello world 1524512982.48
[INFO] [1524512982.580334]: /listener_1_1524512981675I heard hello world 1524512982.58
Une chose û faire attention, c'est le positionnement du rûˋpertoire de travail qui doit ûˆtre û /root/workspace/src/beginner_tutorials/src.
V-F. Automatiser l'exûˋcution de l'exemple Publier/Consommateur▲
Dans la section prûˋcûˋdente, nous avons crûˋûˋ des conteneurs Docker dont deux qui communiquent avec le conteneur modûˋlisant le néud Master. L'outil docker-compose va nous permettre d'orchestrer la crûˋation des conteneurs. Nous allons donc devoir crûˋer un fichier docker-commpose.yml qui dûˋcrit cette orchestration. Toutes les options que nous allons utiliser dans ce fichier docker-compose.yml se baseront sur les options prûˋcûˋdemment utilisûˋes.
- Ouvrir un fichier dans le rûˋpertoire contenant le dossier workspace/, crûˋer un fichier docker-commpose.yml puis saisir le code ci-dessous.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
version: '3'
services:
master:
image: ros:mykinetic
container_name: roscore
command:
- roscore
talker:
image: ros:mykinetic
container_name: talker
volumes:
- ./workspace:/root/workspace
working_dir: /root/workspace
depends_on:
- master
environment:
ROS_MASTER_URI: http://roscore:11311
WORKSPACE_NAME: workspace
command: rosrun beginner_tutorials talker.py
listener:
image: ros:mykinetic
container_name: listener
volumes:
- ./workspace:/root/workspace
working_dir: /root/workspace
depends_on:
- master
environment:
ROS_MASTER_URI: http://roscore:11311
WORKSPACE_NAME: workspace
command: rosrun beginner_tutorials listener.py
networks:
default:
external:
name: ros
Il s'agit d'un fichier yaml qui impose que l'indentation, par des espaces, manifeste une arborescence. La ligne version: '3' signifie que la version 3 du contenu de docker-compose.yml est utilisûˋe. Deux arborescences sont utilisûˋesô : services et networks. Dans services, nous prûˋcisons les trois conteneurs associûˋs aux trois néuds (Master, Publieur et Consommateur). Chaque conteneur se base sur la mûˆme image image: ros:mykinetic, prûˋcise le nom du conteneur par container_name: ... et dûˋcrit un dossier partagûˋ volumes: - ./workspace:/root/workspace. Nous prûˋcisons pour chaque service une commande particuliû´re via command qui reprend les outils ROSô : roscore (pour dûˋmarrer le néud Master) et rosrun. Les variables d'environnement sont explicitûˋes par command. Finalement, depends_on permet d'indiquer que les services talker et listener associûˋs respectivement aux néuds Publieur et Consommateur doivent ûˆtre dûˋmarrûˋs avant le service master. Notons que s'il est possible de prûˋciser un ordre pour les services, il n'est pas garanti que le service master ait pu dûˋmarrer complû´tement avec les autres services. Si c'est le cas, il faudra prûˋvoir dans le code un mûˋcanisme pour vûˋrifier que le néud Master ait effectivement ûˋtûˋ dûˋmarrûˋ et initialisûˋ.
- Pour dûˋmarrer cette orchestration, exûˋcuter la ligne de commande suivanteô :
2.
3.
4.
$ docker-compose up -d
Creating roscore ... done
Creating talker ... done
Creating listener ... done
- Pour afficher les logs, exûˋcuter la ligne de commande suivanteô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
$ docker-compose logs
...
listener | [INFO] [1524577237.793343]: /listener_1_1524577146122I heard hello world 1524577237.79
talker | [INFO] [1524577206.989160]: hello world 1524577206.99
listener | [INFO] [1524577237.892315]: /listener_1_1524577146122I heard hello world 1524577237.89
talker | [INFO] [1524577207.089389]: hello world 1524577207.09
listener | [INFO] [1524577237.990939]: /listener_1_1524577146122I heard hello world 1524577237.99
talker | [INFO] [1524577207.189429]: hello world 1524577207.19
listener | [INFO] [1524577238.092752]: /listener_1_1524577146122I heard hello world 1524577238.09
talker | [INFO] [1524577207.288829]: hello world 1524577207.29
listener | [INFO] [1524577238.191004]: /listener_1_1524577146122I heard hello world 1524577238.19
talker | [INFO] [1524577207.389204]: hello world 1524577207.39
listener | [INFO] [1524577238.294723]: /listener_1_1524577146122I heard hello world 1524577238.29
talker | [INFO] [1524577207.489018]: hello world 1524577207.49
listener | [INFO] [1524577238.393038]: /listener_1_1524577146122I heard hello world 1524577238.39
talker | [INFO] [1524577207.589141]: hello world 1524577207.59
listener | [INFO] [1524577238.492205]: /listener_1_1524577146122I heard hello world 1524577238.49
talker | [INFO] [1524577207.690526]: hello world 1524577207.69
listener | [INFO] [1524577238.594597]: /listener_1_1524577146122I heard hello world 1524577238.59
...
- Pour afficher uniquement les logs d'un service, faire suivre par le nom du serviceô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
$ docker-compose logs listener
Attaching to talker
talker | /opt/ros/kinetic/setup.bash
talker | [INFO] [1524577145.288646]: hello world 1524577145.29
talker | [INFO] [1524577145.388794]: hello world 1524577145.39
talker | [INFO] [1524577145.489195]: hello world 1524577145.49
talker | [INFO] [1524577145.589421]: hello world 1524577145.59
talker | [INFO] [1524577145.689103]: hello world 1524577145.69
talker | [INFO] [1524577145.788987]: hello world 1524577145.79
talker | [INFO] [1524577145.889035]: hello world 1524577145.89
...
V-G. Utilisation de l'outil rostopic▲
û ce stade d'exûˋcution, nous souhaiterions pouvoir analyser notre application pour connaûÛtre les donnûˋes publiûˋes sur un topic, connaûÛtre l'ensemble des topics actuellement abonnûˋs et publiûˋs, ou alors de pouvoir publier directement des donnûˋes dans un topic. Pour rûˋaliser cela, nous allons utiliser l'outil rostopic.
Pour la suite des expûˋrimentations, nous supposons que notre programme prûˋcûˋdent avec trois néuds est toujours en cours d'exûˋcution (voir la section prûˋcûˋdente avec le fichier docker-compose.yml).
V-G-1. Commande rostopic list▲
La commande list permet d'afficher l'ensemble des topics actuellement abonnûˋs et publiûˋs.
- Pour afficher, tous les topics abonnûˋs et publiûˋs, exûˋcuter la commande suivanteô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
$ docker run --rm -it --net ros -e ROS_MASTER_URI=http://roscore:11311 ros:mykinetic rostopic list -v
/opt/ros/kinetic/setup.bash
Published topics:
* /chatter [std_msgs/String] 1 publisher
* /rosout [rosgraph_msgs/Log] 2 publishers
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
Subscribed topics:
* /chatter [std_msgs/String] 1 subscriber
* /rosout [rosgraph_msgs/Log] 1 subscriber
```
Nous retrouvons le _topic_ `/chatter` sur lequel le néud _Publieur_ publie et sur lequel le néud _Consommateur_ ûˋcoute. La donnûˋe envoyûˋe au _topic_ est de type `String` (message `std_msgs/String`) comme dûˋcrit dans le fichier _talker.py_ `pub = rospy.Publisher('chatter', String, queue_size=10)`.
### Commande rostopic echo
La commande **echo** permet d'afficher les donnûˋes qui sont publiûˋes dans un _topic_ particulier. Les donnûˋes sont cohûˋrentes par rapport au type dûˋcrit dans le message associûˋ.
* Pour afficher, les donnûˋes qui sont publiûˋes dans le _topic_ `/chatter`, exûˋcuter la commande suivante :
```bash
$ docker run --rm -it --net ros -e ROS_MASTER_URI=http://roscore:11311 ros:mykinetic rostopic echo /chatter
/opt/ros/kinetic/setup.bash
data: "hello world 1525277581.64"
---
data: "hello world 1525277582.15"
---
data: "hello world 1525277582.65"
---
data: "hello world 1525277583.14"
Pour rappel, le message envoyûˋ û ce topic est de type String. Pour sortir de l'affichage en continu, faites 'CTRL + C'.
V-G-2. Commande rostopic pub▲
La commande pub permet d'envoyer des donnûˋes vers un topic. La syntaxe de cette commande est la suivanteô : rostopic pub [topic] [msg_type] [args] oû¿ topic est le nom du topic, msg_type est le type de message et args un ensemble de paramû´tres pour envoyer des donnûˋes.
- Nous allons commencer par arrûˆter le néud Publieur afin de pouvoir suivre les donnûˋes publiûˋes dans le topic /chatter. Exûˋcuter la commande suivante en vous assurant d'ûˆtre dans le mûˆme rûˋpertoire contenant le fichier docker-compose.yml.
2.
$ docker-compose stop talker
Stopping talker ... done
- Exûˋcuter la commande suivante permettant de publier des donnûˋes dans le topic /chatterô :
2.
3.
$ docker run --rm -it --net ros -e ROS_MASTER_URI=http://roscore:11311 ros:mykinetic rostopic pub -1 /chatter std_msgs/String 'Hello From Docker'
/opt/ros/kinetic/setup.bash
publishing and latching message for 3.0 seconds
- Depuis un autre terminal, afficher le contenu des logs du néud Consommateur en exûˋcutant la commande suivanteô :
2.
3.
4.
5.
6.
7.
$ docker logs listener
[INFO] [1525279892.647035]: /listener_1_1525113602169I heard hello world 1525279892.65
[INFO] [1525279893.147292]: /listener_1_1525113602169I heard hello world 1525279893.15
[INFO] [1525279893.647326]: /listener_1_1525113602169I heard hello world 1525279893.65
[INFO] [1525279894.150914]: /listener_1_1525113602169I heard hello world 1525279894.15
[INFO] [1525279894.648535]: /listener_1_1525113602169I heard hello world 1525279894.65
[INFO] [1525280003.902928]: /listener_1_1525113602169I heard Hello From Docker
Vous pouvez remarquer sur la derniû´re ligne, la donnûˋe que nous venons d'envoyer.
VI. Crûˋer des conteneurs basûˋs sur une image Docker ROS avec une interface graphiqueô : exemple de la Tortue▲
Actuellement, nous avons montrûˋ comment exûˋcuter une application ROS composûˋe de trois néuds ROS sous Docker et dont le retour de l'exûˋcution de chaque néud se faisait sur la console du terminal. Il est tout û fait possible d'exûˋcuter des néuds ROS qui fournissent des interfaces graphiques de type client lourd.
Dans cette section, nous allons montrer comment exûˋcuter avec Docker des néuds ROS utilisant une interface graphique de type client lourd. Pour cela, nous utiliserons le dûˋport d'affichage via la redirection X11 qui est un mûˋcanisme courant quand on utilise un accû´s distant avec SSH. Pour illustrer nos propos, nous utiliserons l'exemple de la tortue disponible sur le site de ROS ( http://wiki.ros.org/ROS/Tutorials/UnderstandingTopics). Contrairement û l'exemple Publieur/Consommateur, nous nous focaliserons uniquement sur l'exûˋcution du programme.
VI-A. Construction d'une image avec les exemples▲
L'exemple de la tortue est disponible via des packages Debian. Nous allons prûˋparer une image Docker qui inclut ces packages.
- Crûˋer un fichier DockerfileTutorial au mûˆme endroit que le prûˋcûˋdent fichier Dockerfile et saisir le texte suivantô :
2.
3.
FROM ros:mykinetic
RUN apt-get update && apt-get install -y ros-kinetic-ros-tutorials ros-kinetic-common-tutorials ros-kinetic-rqt ros-kinetic-rqt-common-plugins && rm -rf /var/lib/apt/lists/
Cette image sera basûˋe sur notre prûˋcûˋdente image appelûˋe ros:mykinetic û laquelle nous installerons de nouvelles dûˋpendances.
- Ouvrir un terminal et saisir la ligne de commande suivanteô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
docker build -f DockerfileTutorial --tag ros:mykinetictutorial .
Sending build context to Docker daemon 2.048kB
Step 1/2 : FROM ros:mykinetic
---> bdad12c671be
Step 2/2 : RUN apt-get update && apt-get install -y ros-kinetic-ros-tutorials ros-kinetic-common-tutorials ros-kinetic-rqt ros-kinetic-rqt-common-plugins && rm -rf /var/lib/apt/lists/
---> Running in 8f5c8e22a40d
...
Setting up ros-kinetic-rqt-image-view (0.4.11-0xenial-20180416-171135-0800) ...
Setting up ros-kinetic-rqt-common-plugins (0.4.8-0xenial-20180419-152950-0800) ...
Setting up odbcinst (2.3.1-4.1) ...
Processing triggers for libc-bin (2.23-0ubuntu10) ...
Removing intermediate container 8f5c8e22a40d
---> 604bf1df9b1e
Successfully built 604bf1df9b1e
Successfully tagged ros:mykinetictutorial
- Assurons-nous que la nouvelle image Docker intûˋgrant les exemples du tutoriel est prûˋsente. Depuis le terminal, saisir la ligne de commande suivanteô :
2.
3.
4.
5.
6.
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros mykinetic f2aae4e9c1fa 3 minutes ago 1.18GB
ros kinetic 4b2e99aadf55 5 days ago 1.18GB
ros mykinetictutorial 604bf1df9b1e About a minute ago 2.27GB
Nous constatons que l'ajout de nouvelles dûˋpendances a considûˋrablement augmentûˋ la taille de l'image (2,27ô Go).
VI-B. Dûˋport d'affichageô : redirection X11▲
Vous avez peut-ûˆtre dûˋjû rûˋalisûˋ du dûˋport d'affichage lors d'une connexion client/serveur via SSH. Pour rappel, le dûˋport d'affichage consiste û rediriger l'affichage via la connexion SSH alors que l'exûˋcution de l'application se fait sur le serveur. Du cûÇtûˋ serveur, il faut que vous autorisiez la redirection X11 et du cûÇtûˋ client il faut disposer d'un serveur X11. La redirection X11 avec Docker se base sur le mûˆme principe. Voyons voir comment mettre en place cela sous macOS en utilisant XQuartz pour le serveur X11.
VI-B-1. Pour macOS▲
La premiû´re ûˋtape est de rûˋcupûˋrer l'adresse IP publique du client (systû´me hûÇte) afin de la transmettre au serveur (le conteneur) de telle sorte qu'une communication bidirectionnelle puisse exister.
1ô - Exûˋcuter la commande suivante pour rûˋcupûˋrer l'adresse du client (systû´me hûÇte)ô :
2.
$ ip=$(ifconfig|grep 'inet '|grep -v '127.0.0.1'| tail -1|awk '{print $2}')
$ echo $ip
Les configurations rûˋseaux sont listûˋes via ifconfigô ; filtrer par inetô ; les adresses 127.0.0.1 sont excluesô ; la derniû´re IP est choisie (faire attention si vous avez û la fois le Wi-Fi et l'Ethernet) et finalement seule l'adresse IP est conservûˋe.
2ô - Exûˋcuter la commande suivante pour dûˋmarrer l'outil socat afin d'exposer la socket de XQuartz locale sur un port TCPô :
socat TCP-LISTEN:6001,reuseaddr,fork UNIX-CLIENT:\"$DISPLAY\" &
3ô - Quand un conteneur est crûˋûˋ, dûˋfinir la variable d'environnement DISPLAY en prûˋcisant l'adresse IP du systû´me hûÇte. Exûˋcuter la ligne de commande suivanteô :
$ docker run -e DISPLAY=$ip:1 ...
VI-B-2. Pour Linux▲
Pour le systû´me Linux, c'est un peu plus simple puisque le serveur X11 est intûˋgrûˋ au systû´me.
1ô - Exûˋcuter la commande suivante permettant û l'utilisateur root d'accûˋder au serveur X11ô :
$ xhost +SI:localuser:root
2ô - Quand un conteneur est crûˋûˋ, dûˋfinir la variable d'environnement DISPLAY en prûˋcisant comme valeur le contenu de la variable DISPLAY du systû´me localô :
$ docker run -e DISPLAY=unix$DISPLAY ...
VI-C. Exûˋcution de l'exemple Tortue▲
Pour l'exûˋcution de l'exemple complet, nous allons prûˋparer quatre terminaux. û noter que nous n'aurons pas besoin du rûˋpertoire workspace sachant que le code source de la tortue a ûˋtûˋ dûˋlivrûˋ par les packages installûˋs depuis l'image Docker.
- Exûˋcuter la commande suivante afin de crûˋer le néud Masterô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
$ docker run --rm -it --name roscore --net ros ros:mykinetictutorial roscore
/opt/ros/kinetic/setup.bash
... logging to /root/.ros/log/1f0bbca6-4eee-11e8-b026-0242ac120002/roslaunch-90e712dfdfbf-1.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://90e712dfdfbf:46873/
ros_comm version 1.12.13
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.13
NODES
auto-starting new master
process[master]: started with pid [39]
ROS_MASTER_URI=http://90e712dfdfbf:11311/
setting /run_id to 1f0bbca6-4eee-11e8-b026-0242ac120002
process[rosout-1]: started with pid [52]
started core service [/rosout]
Nous allons ensuite crûˋer le néud correspondant û l'affichage de la tortue dans son environnement. Avant tout, nous allons configurer le dûˋport d'affichage pour la redirection X11 (l'expûˋrimentation se fera sous macOS, pour Linux se rûˋfûˋrer û la section prûˋcûˋdente).
- Exûˋcuter les lignes de commande suivantes depuis un nouveau terminal pour crûˋer un nouveau néud basûˋ sur l'application turtlesim_node du package turtlesimô :
2.
3.
4.
5.
6.
7.
8.
$ ip=$(ifconfig|grep 'inet '|grep -v '127.0.0.1'| tail -1|awk '{print $2}')
$ socat TCP-LISTEN:6001,reuseaddr,fork UNIX-CLIENT:\"$DISPLAY\" &
$ docker run --rm -it --name turtlesim --net ros -e ROS_MASTER_URI=http://roscore:11311 -e XAUTHORITY=/tmp/xauth -e DISPLAY=$ip:1 ros:mykinetictutorial rosrun turtlesim turtlesim_node
/opt/ros/kinetic/setup.bash
[ INFO] [1525365018.259424800]: Starting turtlesim with node name /turtlesim
[ INFO] [1525365018.272410200]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
libGL error: No matching fbConfigs or visuals found
libGL error: failed to load driver: swrast
Le rûˋsultat attendu devrait ûˆtre l'affichage d'une fenûˆtre comme montrûˋ sur la figure suivanteô :
Pour contrûÇler la tortue, nous allons crûˋer le néud basûˋ sur l'application turtle_teleop_key du package turtlesim. Le contrûÇle ne se fera pas depuis une interface graphique, mais depuis la console de la ligne de commande.
- Depuis un nouveau terminal, exûˋcuter la ligne de commande suivanteô :
2.
3.
4.
5.
$ docker run --rm -it --name turtleteleopkey --net ros -e ROS_MASTER_URI=http://roscore:11311 ros:mykinetictutorial rosrun turtlesim turtle_teleop_key
/opt/ros/kinetic/setup.bash
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Avec les touches flûˋchûˋes de votre clavier, vous pouvez faire bouger la tortue. Un rûˋsultat est disponible sur la figure ci-dessous montrant une animation de la tortue sur la fenûˆtre de simulation.
Pour complûˋter cet exemple, nous allons ajouter un nouveau néud pour intûˋgrer l'outil rqt_graph (disponible via les packages ros-kinetic-rqt et ros-kinetic-rqt-common-plugins). rqt_graph permet de visualiser les relations entre les néuds du systû´me complet en affichant, le nom des néuds, les messages et les topics
- Depuis un nouveau terminal, exûˋcuter la ligne de commande suivante pour dûˋmarrer l'application rqt_graph du package rqt_graphô :
$ docker run --rm -it --name rqt_graph --net ros -e ROS_MASTER_URI=http://roscore:11311 -e XAUTHORITY=/tmp/xauth -e DISPLAY=$ip:1 ros:mykinetictutorial rosrun rqt_graph rqt_graph
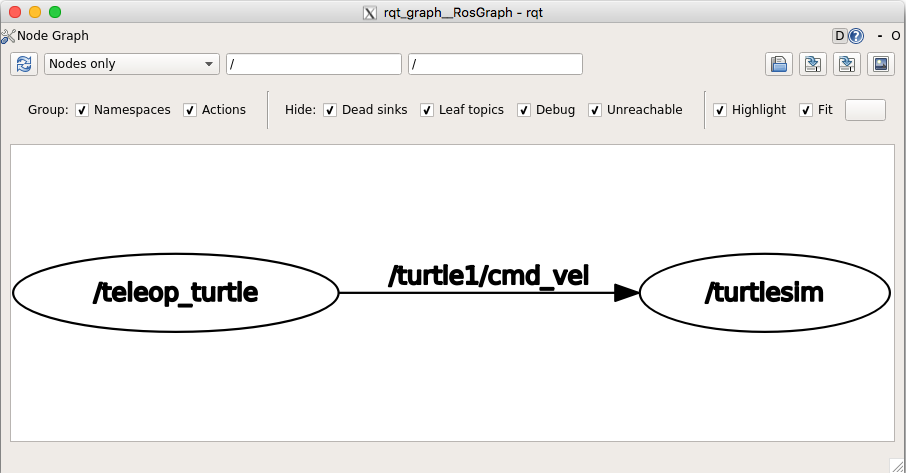
Le rûˋsultat attendu affiche une interface graphique en montrant la relation entre le néud turtlesim et le néud teleop_turtle et dont la communication est obtenue par le message /turtle1/cmd_vel.
VII. Dûˋploiement avec des cartes Raspberry Pi▲
Cette section adresse plusieurs problûˋmatiquesô :
- utilisation d'une image Docker sur des architectures matûˋrielles diffûˋrentesô : Processeur ARM pour les cartes Raspberry Pi et processeur x86 pour macOSô ;
- localisation des codes sources sur des machines physiques diffûˋrentesô ;
- invocation de commandes Docker sur des machines diffûˋrentes.
Pour rûˋpondre û ces problûˋmatiques, nous envisageonsô :
- utilisation d'images Docker ROS multisystû´mes pour le processeur ARM et x86ô ;
- utilisation de l'outil rsync pour synchroniser les codes sources sur plusieurs machines physiquesô ;
- utilisation de l'outil docker-machine pour contrûÇler les moteurs Docker û distance.
VII-A. Prûˋsentation de l'exemple et du matûˋriel▲
Reprenons l'exemple du Publieur/Consommateur sur lequel une communication avec les ports GPIO va ûˆtre ajoutûˋe. Comme nous exploitons des cartes Raspberry Pi, nous allons en profiter pour utiliser un peu de matûˋriel ûˋlectronique. Notre ajout sera simple, depuis le néud Consommateur une LED s'allumera ou s'ûˋteindra û chaque rûˋception d'un message depuis le topic /chatter. Par ailleurs, nous allons nous efforcer û crûˋer un package pour les néuds Talker et Listener contrairement û la premiû´re prûˋsentation de cet exemple oû¿ nous avions utilisûˋ qu'un seul package.
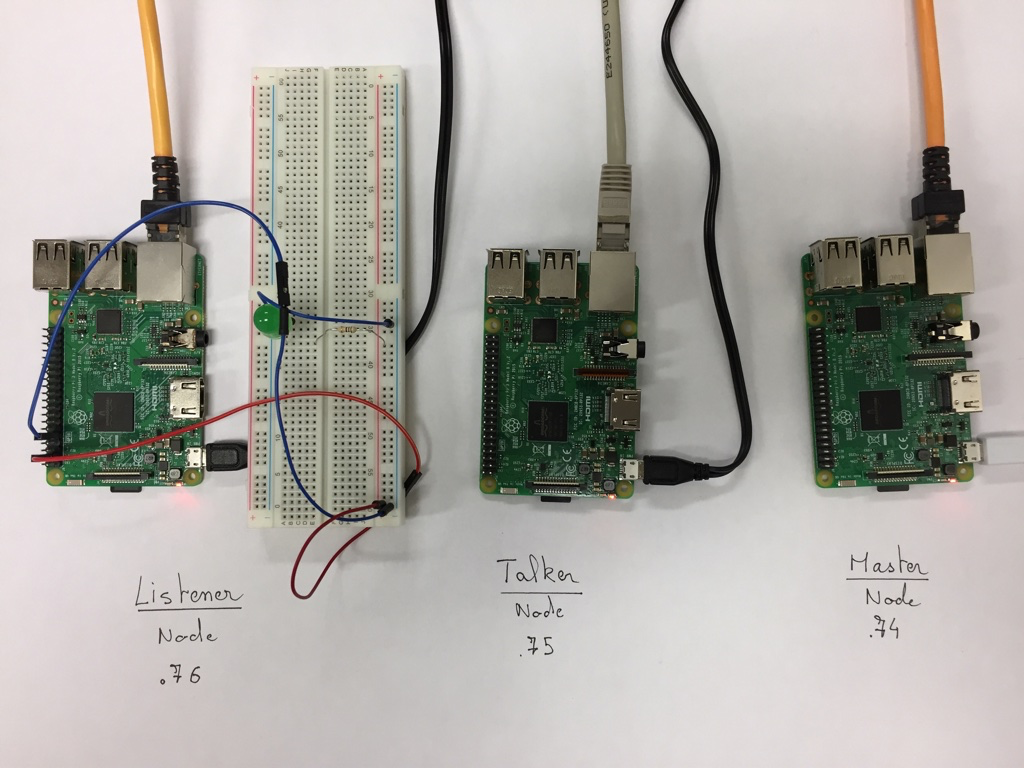
Concernant le matûˋriel, trois cartes Raspberry Pi (modû´le 3 avec une capacitûˋ de 32ô Go pour la carte micro SD) seront utilisûˋes correspondant respectivement aux trois néuds utilisûˋs dans l'exempleô : une carte pour le néud Master, une carte pour le néud Publieur et une carte pour le néud Consommateur. Bien entendu, nous aurions pu nous limiter û une seule carte Raspberry Pi pour exûˋcuter les trois néuds, mais nous voulions montrer un dûˋploiement avec des contraintes sur le rûˋseau. Pour ce dernier point, les trois cartes Raspberry Pi ainsi que le MacBook Pro du dûˋveloppeur seront dans le mûˆme sous rûˋseau. Tous les pûˋriphûˋriques rûˋseau pourront donc ûˆtre accessibles depuis le poste du dûˋveloppeur.
Voici une description complû´te de notre expûˋrimentationô :
- XXX.YYY.ZZZ.74ô : néud Masterô ;
- XXX.YYY.ZZZ.75ô : néud Publieurô ;
- XXX.YYY.ZZZ.76ô : néud Consommateur + breadboard (LED + rûˋsistance)ô ;
- XXX.YYY.ZZZ.77ô : le poste du dûˋveloppeur sous macOS.
Sur chaque carte Raspberry Pi, le systû´me d'exploitation HypriotOS sera utilisûˋ. Il s'agit d'un systû´me d'exploitation dûˋdiûˋ aux cartes Raspberry Pi dûˋveloppûˋ autour de l'ûˋcosystû´me Docker. Les avantages d'utiliser ce systû´me d'exploitation au lieu du classique Raspbian sontô : 1) de pouvoir profiter de la derniû´re version de Docker et des outils satellites et 2) de disposer d'un systû´me ûˋpurûˋ.
Finalement, la carte Raspberry Pi en charge du néud Consommateur sera connectûˋe avec une breadboard et un montage ûˋlectronique simpliste û base d'une LED et d'une rûˋsistance. Les pins 3 (GPIO02) et 9 (Ground) ont ûˋtûˋ utilisûˋs pour alimenter la breadboard.
Nous donnons ci-dessous une photo du montage completô :
VII-B. Expûˋrimentationsô : du dûˋveloppement au dûˋploiement▲
Cette section prûˋsente l'expûˋrimentation complû´te û savoir la prûˋparation des cartes Raspberry Pi, la crûˋation des machines Docker, le tûˋlûˋchargement et la crûˋation des images Docker, la synchronisation des codes sources et finalement l'exûˋcution du programme complet.
VII-B-1. Prûˋparation des cartes Raspberry Pi▲
Cette section s'intûˋresse û prûˋparer les trois cartes Raspberry Pi afin d'installer et configurer le systû´me d'exploitation HypriotOS.
Les trois cartes Raspberry Pi ainsi que le MacBook Pro sont dans le mûˆme sous rûˋseau. Tous les pûˋriphûˋriques rûˋseau se voient entre eux.
- Tûˋlûˋcharger la derniû´re version de l'image HypriotOS en vous rendant û cette adresseô : https://github.com/hypriot/image-builder-rpi/releases. Lors de l'ûˋcriture de l'article, c'est la version 1.9.0 qui a ûˋtûˋ utilisûˋe.
- Pour l'installation de l'image HypriotOS sur la carte SD, l'outil graphique Etcher multiplateforme a ûˋtûˋ utilisûˋ ( https://etcher.io/). Une fois l'image HypriotOS copiûˋe sur les trois cartes micro SD, insûˋrer ces cartes micro SD dans l'emplacement prûˋvu sur les cartes Raspberry Pi. Les informations d'identification sont les suivantesô : utilisateur pirate et le mot de passe hypriot.
Afin d'ûˋviter de vous authentifier via l'utilisation explicite d'un mot de passe, une clûˋ publique a ûˋtûˋ utilisûˋe. En supposant que vous disposez dûˋjû d'une clûˋ privûˋe et publique dans votre rûˋpertoire .ssh, nous allons copier cette derniû´re sur chaque carte Raspberry Pi via l'outil ssh-copy-id.
- Ouvrir une invite de commande et saisir la ligne de commande suivanteô :
$ ssh-copy-id -i ~/.ssh/id_rsa.pub pirate@XXX.YYY.ZZZ.76
Actuellement le systû´me d'exploitation installûˋ sur les cartes Raspberry Pi est HypriotOS lui-mûˆme basûˋ sur Raspbian. Toutefois Docker-Machine de la suite Docker permettant de contrûÇler des moteurs Docker (Docker engine) û distance ne reconnaûÛt pas encore le systû´me Raspbian. Nous allons donc renommer le systû´me en Debian afin de rûˋsoudre ce problû´me.
- Se connecter en ssh (ssh pirate@XXX.YYY.ZZZ.74) sur chaque carte Raspberry Pi et changer la valeur ID depuis le fichier /etc/os-releaseô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
$ ssh pirate@XXX.YYY.ZZZ.74
...
$ sudo nano /etc/os-release
PRETTY_NAME="Raspbian GNU/Linux 9 (stretch)"
NAME="Raspbian GNU/Linux"
VERSION_ID="9"
VERSION="9 (stretch)"
ID=debian
ID_LIKE=debian
HOME_URL="http://www.raspbian.org/"
SUPPORT_URL="http://www.raspbian.org/RaspbianForums"
BUG_REPORT_URL="http://www.raspbian.org/RaspbianBugs"
HYPRIOT_OS="HypriotOS/armhf"
HYPRIOT_OS_VERSION="v2.0.1"
HYPRIOT_DEVICE="Raspberry Pi"
HYPRIOT_IMAGE_VERSION="v1.9.0"
Afin de synchroniser le rûˋpertoire workspace avec les diffûˋrents Raspberry Pi, l'outil rsync doit ûˆtre installûˋ sur chaque carte.
- Se connecter sur chaque carte Raspberry Pi et installer l'outil rsyncô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
$ sudo apt-get update
Get:1 http://raspbian.raspberrypi.org/raspbian stretch InRelease [15.0 kB]
Get:2 http://archive.raspberrypi.org/debian stretch InRelease [25.3 kB]
Get:3 http://raspbian.raspberrypi.org/raspbian stretch/main armhf Packages [11.7 MB]
Get:4 http://archive.raspberrypi.org/debian stretch/main armhf Packages [145 kB]
Get:5 https://download.docker.com/linux/raspbian stretch InRelease [15.3 kB]
...
$ sudo apt-get install rsync
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following NEW packages will be installed:
rsync
0 upgraded, 1 newly installed, 0 to remove and 1 not upgraded.
...
VII-B-2. Crûˋation des docker-machine▲
Depuis macOS, nous allons crûˋer trois machines Docker connectûˋes respectivement sur les trois cartes Raspberry PI.
- Saisir la ligne de commande suivante pour crûˋer un docker-machine vers la carte Raspberry Pi dûˋdiûˋe û la gestion du néud Master.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
$ docker-machine create --driver generic --generic-ip-address=XXX.YYY.ZZZ.74 --generic-ssh-user "pirate" --generic-ssh-key ~/.ssh/id_rsa --engine-storage-driver overlay2 master
Running pre-create checks...
Creating machine...
(master) Importing SSH key...
Waiting for machine to be running, this may take a few minutes...
Detecting operating system of created instance...
Waiting for SSH to be available...
Detecting the provisioner...
Provisioning with debian...
Copying certs to the local machine directory...
Copying certs to the remote machine...
Setting Docker configuration on the remote daemon...
Checking connection to Docker...
Docker is up and running!
To see how to connect your Docker Client to the Docker Engine running on this virtual machine, run: docker-machine env master
La crûˋation de cette machine Docker passe par l'utilisation du driver gûˋnûˋrique --driver generic. Diffûˋrentes options doivent ûˆtre indiquûˋes û savoirô : l'adresse IP de la machine --generic-ip-address=XXX.YYY.ZZZ.74, l'utilisateur ssh --generic-ssh-user "pirate", la clûˋ publique --generic-ssh-key ~/.ssh/id_rsa et finalement le nom de la machine master. Lors de la crûˋation de la machine Docker, le nom rûˋseau de la machine (hostname) portera son nom û savoir ici master.
- Saisir la ligne de commande suivante pour crûˋer un docker-machine vers la carte Raspberry Pi dûˋdiûˋe û la gestion du néud Publieurô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
$ docker-machine create --driver generic --generic-ip-address=XXX.YYY.ZZZ.75 --generic-ssh-user "pirate" --generic-ssh-key ~/.ssh/id_rsa --engine-storage-driver overlay2 talker
Running pre-create checks...
Creating machine...
(talker) Importing SSH key...
Waiting for machine to be running, this may take a few minutes...
Detecting operating system of created instance...
Waiting for SSH to be available...
Detecting the provisioner...
Provisioning with debian...
Copying certs to the local machine directory...
Copying certs to the remote machine...
Setting Docker configuration on the remote daemon...
Checking connection to Docker...
Docker is up and running!
To see how to connect your Docker Client to the Docker Engine running on this virtual machine, run: docker-machine env talker
- Saisir la ligne de commande suivante pour crûˋer un docker-machine vers la carte Raspberry Pi dûˋdiûˋe û la gestion du néud Consommateurô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
$ docker-machine create --driver generic --generic-ip-address=XXX.YYY.ZZZ.76 --generic-ssh-user "pirate" --generic-ssh-key ~/.ssh/id_rsa --engine-storage-driver overlay2 talker
Running pre-create checks...
Creating machine...
(listener) Importing SSH key...
Waiting for machine to be running, this may take a few minutes...
Detecting operating system of created instance...
Waiting for SSH to be available...
Detecting the provisioner...
Provisioning with debian...
Copying certs to the local machine directory...
Copying certs to the remote machine...
Setting Docker configuration on the remote daemon...
Checking connection to Docker...
Docker is up and running!
To see how to connect your Docker Client to the Docker Engine running on this virtual machine, run: docker-machine env listener
- Pour s'assurer que les trois machines Docker ont ûˋtûˋ correctement crûˋûˋes, saisir la commande suivanteô :
2.
3.
4.
NAME ACTIVE DRIVER STATE URL SWARM DOCKER ERRORS
master - generic Running tcp://XXX.YYY.ZZZ.74:2376 v18.04.0-ce
talker - generic Running tcp://XXX.YYY.ZZZ.75:2376 v18.04.0-ce
listener - generic Running tcp://XXX.YYY.ZZZ.76:2376 v18.04.0-ce
Nous remarquons qu'aucune machine Docker n'est active (colonne ACTIVE) et qu'elles sont toutes en fonctionnement (colonne STATE) avec la mûˆme version du moteur Docker.
Pour prendre le contrûÇle d'une machine Docker, utiliser la commande suivante eval $(docker-machine env NOM_MACHINE) oû¿ NOM_MACHINE est le nom de la machine. Cette commande aura pour effet de modifier les variables d'environnement de votre systû´me afin de pouvoir se connecter sur une instance distante de Docker.
- Pour se connecter û la machine Docker du néud Master, saisir la ligne de commande suivanteô :
$ eval $(docker-machine env master)
Une fois connectûˋe, toutes les commandes Docker que nous avons ûˋtudiûˋes sont utilisables û savoir les commandes pour la gestion des images, la gestion des conteneursãÎ
- Exûˋcuter la ligne de commande suivante pour vûˋrifier qu'aucune image Docker n'est prûˋsente puisque nous n'avons pas encore interagi avec cette instance Dockerô :
2.
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
- Saisir la commande ci-dessous pour se connecter û l'instance locale de Docker (celui installûˋ sur macOS)ô :
$ eval $(docker-machine env -u)
- Puis afficher les images Docker via la ligne de commandeô :
2.
3.
4.
5.
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros mykinetic f2aae4e9c1fa 3 minutes ago 1.18GB
ros kinetic 4b2e99aadf55 5 days ago 1.18GB
ros mykinetictutorial 604bf1df9b1e About a minute ago 2.27GB
Nous retrouvons les images Docker tûˋlûˋchargûˋes et crûˋûˋes prûˋcûˋdemment.
VII-B-3. Prûˋparer l'image Docker▲
Pour nos expûˋrimentations, nous avons besoin de deux images diffûˋrentesô :
- L'image ros:mykinetic pour les néuds Master et Publieurô ;
- Une image basûˋe sur ros:mykinetic et qui intû´gre la bibliothû´que Python permettant de communiquer avec les ports GPIO. Cette image sera utilisûˋe par le néud Consommateur.
Bien entendu, comme les architectures matûˋrielles entre macOS (plateforme x86) et une carte Raspberry Pi (plateforme ARM) ne sont pas les mûˆmes, l'image ros:mykinetic doit ûˆtre reconstruite sur les cartes Raspberry Pi. Heureusement, les images Docker officielles ROS sont fournies suivant diffûˋrents types d'architecture matûˋrielle. Dans la suite, les images pour chacun des néuds vont ûˆtre construites en utilisant les machines Docker prûˋcûˋdemment crûˋûˋes.
- Se connecter û la machine Docker intitulûˋe Master via la ligne de commande suivanteô :
eval $(docker-machine env master)
- Se positionner dans le rûˋpertoire contenant le fichier Dockerfile que nous avions utilisûˋ prûˋcûˋdemment pour construire l'image ros:mykinetic et lancer la ligne de commande suivanteô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
docker build --tag ros:mykinetic .
Sending build context to Docker daemon 579.6kB
Step 1/2 : FROM ros:kinetic
kinetic: Pulling from library/ros
f68dc00194f4: Pull complete
281b914f46e3: Pull complete
754b205ebc94: Pull complete
1418c61fca2a: Pull complete
8b471dd10511: Pull complete
b5050587be2f: Pull complete
334ce8d24851: Pull complete
10d06c2ef1c0: Pull complete
9b97dba49af9: Pull complete
b1310601b613: Pull complete
a715f7dcd6ee: Pull complete
bb4e27b5b65d: Pull complete
af540861d5e6: Pull complete
Digest: sha256:3ca1c10c802b3bb54b068ece8a4999b6388aefd7e21c970574ae6b0e9939ebfb
Status: Downloaded newer image for ros:kinetic
---> f1b693d5d950
Step 2/2 : COPY ./ros_entrypoint.sh /
---> a9598ee40ef9
Successfully built a9598ee40ef9
Successfully tagged ros:mykinetic
Premier constat ûˋvident, la construction de l'image Docker ros:mykinetic sur architecture matûˋrielle ARM est lente. Second constat, le fichier ros_entrypoint.sh, prûˋsent uniquement sur le systû´me de fichiers de macOS, est copiûˋ vers la carte Raspberry Pi Master pour construire l'image.
- Afficher la liste des images Docker de la carte Raspberry Pi Master pour s'assurer que ros:mykinetic est bien prûˋsenteô :
2.
3.
4.
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros mykinetic a9598ee40ef9 8 days ago 944MB
ros kinetic f1b693d5d950 9 days ago 944MB
- Procûˋder de la mûˆme faûÏon pour la carte Raspberry Pi Publieur, saisir les lignes de commandes ci-dessousô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
eval $(docker-machine env talker)
docker build --tag ros:mykinetic .
Sending build context to Docker daemon 579.6kB
Step 1/2 : FROM ros:kinetic
kinetic: Pulling from library/ros
f68dc00194f4: Pull complete
281b914f46e3: Pull complete
754b205ebc94: Pull complete
1418c61fca2a: Pull complete
8b471dd10511: Pull complete
b5050587be2f: Pull complete
334ce8d24851: Pull complete
10d06c2ef1c0: Pull complete
9b97dba49af9: Pull complete
b1310601b613: Pull complete
a715f7dcd6ee: Pull complete
bb4e27b5b65d: Pull complete
af540861d5e6: Pull complete
Digest: sha256:3ca1c10c802b3bb54b068ece8a4999b6388aefd7e21c970574ae6b0e9939ebfb
Status: Downloaded newer image for ros:kinetic
---> f1b693d5d950
Step 2/2 : COPY ./ros_entrypoint.sh /
---> a9598ee40ef9
Successfully built a9598ee40ef9
Successfully tagged ros:mykinetic
Une bonne pratique afin d'ûˋviter de construire plusieurs fois la mûˆme image Docker serait de la dûˋposer sur un registre Docker (par exemple DockerHub.
Il reste encore une image Docker û construire, celle qui sera utilisûˋe sur la carte Raspberry Pi Consommateur. Cette image doit intûˋgrer la bibliothû´que Python permettant de communiquer avec les ports GPIO.
- Ouvrir un ûˋditeur de texte et saisir le code ci-dessous. Sauvegardez dans un fichier appelûˋ DockerfileRPI.
2.
3.
FROM ros:mykinetic
RUN apt-get update && apt-get install -y wget && wget -qO- https://files.pythonhosted.org/packages/e2/58/6e1b775606da6439fa3fd1550e7f714ac62aa75e162eed29dbec684ecb3e/RPi.GPIO-0.6.3.tar.gz --no-check-certificate | tar xvz && cd RPi.GPIO-0.6.3/ && python setup.py install
- Depuis une invite de commande, saisir les commandes suivantes pour construire l'image depuis la machine Docker appelûˋe Consommateurô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
eval $(docker-machine env listener)
docker build -f DockerfileRPI --tag ros:mykineticrpi .
Sending build context to Docker daemon 580.6kB
Step 1/3 : FROM ros:kinetic
---> f1b693d5d950
Step 2/3 : COPY ./ros_entrypoint.sh /
---> Using cache
---> 511e164624c5
Step 3/3 : RUN apt-get update && apt-get install -y wget && wget -qO- https://files.pythonhosted.org/packages/e2/58/6e1b775606da6439fa3fd1550e7f714ac62aa75e162eed29dbec684ecb3e/RPi.GPIO-0.6.3.tar.gz --no-check-certificate | tar xvz && cd RPi.GPIO-0.6.3/ && python setup.py install
---> Running in 3fde0b10d649
Get:1 http://ports.ubuntu.com/ubuntu-ports xenial InRelease [247 kB]
Get:2 http://ports.ubuntu.com/ubuntu-ports xenial-updates InRelease [109 kB]
...
running install_egg_info
Writing /usr/local/lib/python2.7/dist-packages/RPi.GPIO-0.6.3.egg-info
Removing intermediate container 3fde0b10d649
---> 018a768e8f3c
Successfully built 018a768e8f3c
Successfully tagged ros:mykineticrpi
- Afficher la liste des images Docker de la carte Raspberry Pi correspondant au néud Consommateur pour s'assurer que ros:mykineticrpi est bien prûˋsenteô :
2.
3.
4.
5.
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
ros mykineticrpi 018a768e8f3c 10 days ago 987MB
ros mykinetic 511e164624c5 10 days ago 944MB
ros kinetic f1b693d5d950 11 days ago 944MB
Nous disposons û cette ûˋtape de trois cartes Rapsberry Pi avec pour chacune des images Docker. Voici en dûˋtail la rûˋpartition des images Dockerô :
- XXX.YYY.ZZZ.74ô : néud Master avec une image Docker ros:mykineticô ;
- XXX.YYY.ZZZ.75ô : néud Publieur avec une image Docker ros:mykineticô ;
- XXX.YYY.ZZZ.76ô : néud Consommateur + breadboard (LED + rûˋsistance) avec une image Docker ros:mykineticrpi.
VII-B-4. Rendre accessible le rûˋpertoire de travail (workspace)▲
Le rûˋpertoire de travail (portant le nom de workspacerpi pour cet exemple) est disponible sur le poste du dûˋveloppeur et doit ûˆtre partagûˋ sur les diffûˋrents néuds. Pour rûˋaliser cette opûˋration, l'outil rsync sera utilisûˋ pour synchroniser le rûˋpertoire workspace tandis que l'outil fswatch sera utilisûˋ pour ûˋcouter les changements sur le code source.
Pour revenir û notre exemple, un rûˋpertoire de travail workspacerpi avec le mûˆme package beginner_tutorials qu'au dûˋbut du tutoriel sera utilisûˋ. Le contenu du rûˋpertoire de travail sera synchronisûˋ avec les cartes Rapsberry Pi utilisûˋes pour l'exûˋcution des néuds Publieur et Consommateur.
- Activer la machine Docker du poste de dûˋveloppeur û partir de la ligne de commande suivanteô :
$ eval $(docker-machine env -u)
- Ouvrir une invite de commande et exûˋcuter les commandes suivantesô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
$ mkdir -p workspacerpi/src
$ docker run --rm -it -e WORKSPACE_NAME=workspacerpi -v $(pwd)/workspacerpi:/root/workspacerpi -w /root/workspacerpi/src ros:mykinetic catkin_create_pkg beginner_tutorials std_msgs rospy
Base path: /root/workspacerpi
Source space: /root/workspacerpi/src
Build space: /root/workspacerpi/build
Devel space: /root/workspacerpi/devel
Install space: /root/workspacerpi/install
Creating symlink "/root/workspacerpi/src/CMakeLists.txt" pointing to "/opt/ros/kinetic/share/catkin/cmake/toplevel.cmake"
...
Created file beginner_tutorials/package.xml
Created file beginner_tutorials/CMakeLists.txt
Created folder beginner_tutorials/src
Successfully created files in /root/workspacerpi/src/beginner_tutorials. Please adjust the values in package.xml.
- Ajouter le contenu ci-dessous dans le fichier workspacerpi/src/beginner_tutorials/src/talker.py
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(2) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
Ce code du fichier talker.py est le mûˆme que celui que nous avions prûˋsentûˋ au dûˋbut du tutoriel.
- Ajouter le contenu ci-dessous dans le fichier workspacerpi/src/beginner_tutorials/src/listener.py
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
#!/usr/bin/env python
import rospy
import RPi.GPIO as GPIO
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
GPIO.output(3, not GPIO.input(3))
def listener():
# In ROS, nodes are uniquely named. If two nodes with the same
# node are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__ == '__main__':
GPIO.setmode(GPIO.BOARD)
GPIO.setup(3, GPIO.OUT, initial = GPIO.HIGH)
listener()
Ce code est basûˋ sur celui du fichier listener.py utilisûˋ au dûˋbut du tutoriel et sur lequel nous avons ajoutûˋ des instructions pour faire clignoter la LED de notre circuit ûˋlectronique.
- Exûˋcuter la ligne de commande suivante pour dûˋmarrer l'ûˋcoute du rûˋpertoire de travail workspacerpi et rûˋaliser les actions de synchronisationô :
$ fswatch -o $(pwd)/workspacerpi | xargs -n1 -I{} /bin/sh -c "rsync -avzhe ssh --progress $(pwd)/workspacerpi pirate@XXX.YYY.ZZZ.75:/home/pirate && rsync -avzhe ssh --progress $(pwd)/workspacerpi pirate@XXX.YYY.ZZZ.76:/home/pirate" &
û chaque changement du rûˋpertoire de travail workspacerpi, tout son contenu est transfûˋrûˋ vers les deux cartes Raspberry Pi dûˋdiûˋes aux néuds Publieur et Consommateur. Les actions consistent û invoquer l'outil rsync. Dans cette proposition, nous considûˋrons que tous les changements liûˋs au rûˋpertoire de travail (par exemple une compilation via l'outil catkin_make) seront effectuûˋs depuis le poste du dûˋveloppeur.
VII-B-5. Exûˋcuter l'application complû´te▲
La derniû´re ûˋtape consiste û exûˋcuter notre application composûˋe de trois néuds sur les cartes Raspberry Pi. Nous aurons besoin de trois terminaux pour nos expûˋrimentations.
Avant de dûˋbuter notre expûˋrimentation, il est important de prûˋciser que tous les ports rûˋseau des cartes Raspberry Pi correspondants aux néuds Publieur et Consommateur doivent ûˆtre ouverts. En effet, comme dûˋcrit dans la partie introduction û ROS, la communication entre les néuds se fait de maniû´re bidirectionnelle (point û point). Ainsi, un néud communique avec le néud Master via le port 11311 et inversement le néud Master communique avec un néud via un port dûˋfini alûˋatoirement par le Master. On ne peut donc pas prûˋvoir le port qui sera utilisûˋ par le Master pour communiquer avec un néud. Il est donc nûˋcessaire d'ouvrir tous les ports. Du cûÇtûˋ, de la mise en place avec Docker, plusieurs solutions sont possibles. La premiû´re est d'utiliser le rûˋseau host (--net host) qui va faire en sorte que le rûˋseau d'un conteneur ne soit pas isolûˋ. En d'autres termes, si vous exûˋcutez un conteneur qui exploite le port 8080 et que vous utilisez le rûˋseau host, alors ce port 8080 sera accessible depuis l'adresse IP de la machine hûÇte. Une des limitations û cette solution, c'est que sous DockerForMac et DockerForWindows le rûˋseau hûÇte ne se comporte pas de la mûˆme faûÏon que sous Linux (û cause des microhyperviseurs utilisûˋs qui rajoutent un niveau supplûˋmentaire au rûˋseau). Une seconde solution est d'exposer un intervalle de port sous Docker (-p 30000-50000:30000-50000). Comme le néud Master s'appuie sur le systû´me Linux pour dûˋterminer quels sont les ports disponibles, il suffira de restreindre l'intervalle de ces ports disponibles. Dans la suite de nos expûˋrimentations, nous utiliserons la premiû´re solution û base de rûˋseau host.
- Depuis un premier terminal, exûˋcuter les lignes de commandes suivantes pour dûˋmarrer le néud Masterô :
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
$ eval $(docker-machine env master)
$ docker run --rm -it --name roscore ros:mykinetic roscore
/opt/ros/kinetic/setup.bash
... logging to /root/.ros/log/d2008f1a-4b71-11e8-8f7b-0242ac110002/roslaunch-d488117aaa91-1.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://d488117aaa91:40265/
ros_comm version 1.12.13
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.13
NODES
auto-starting new master
process[master]: started with pid [39]
ROS_MASTER_URI=http://d488117aaa91:11311/
setting /run_id to d2008f1a-4b71-11e8-8f7b-0242ac110002
process[rosout-1]: started with pid [52]
started core service [/rosout]
La premiû´re chose û rûˋaliser est de rendre active la machine Docker intitulûˋe Master. Comme il s'agit du néud Master et que nous connaissons le port û utiliser (11311), il n'est pas nûˋcessaire de spûˋcifier le rûˋseau host en paramû´tre.
- Depuis un deuxiû´me terminal, exûˋcuter les lignes de commandes suivantes pour dûˋmarrer le néud Publieurô :
2.
3.
4.
5.
6.
7.
8.
$ eval $(docker-machine env talker)
$ docker run --rm -it -e WORKSPACE_NAME=workspacerpi --net host --name talker -e ROS_IP=XXX.YYY.ZZZ.75 -e ROS_MASTER_URI=http://XXX.YYY.ZZZ.74:11311 -v /home/pirate/workspacerpi:/root/workspacerpi -w /root/workspacerpi ros:mykinetic rosrun beginner_tutorials talker.py
/opt/ros/kinetic/setup.bash
[INFO] [1524982683.522040]: hello world 1524982683.52
[INFO] [1524982684.022705]: hello world 1524982684.02
[INFO] [1524982684.523073]: hello world 1524982684.52
[INFO] [1524982685.023171]: hello world 1524982685.02
[INFO] [1524982685.523175]: hello world 1524982685.52
Nous commenûÏons par rendre active la machine Docker intitulûˋe Talker (celle dûˋcrivant le néud Publieur). Dans la commande de crûˋation du conteneur pour dûˋmarrer le néud Publieur de nouvelles options sont utilisûˋesô : --net host permet de spûˋcifier le rûˋseau û utiliserô ; -e ROS_IP=XXX.YYY.ZZZ.75 permet de donner l'adresse IP du néud Publieur, sans cette option le hostname du conteneur aurait ûˋtûˋ utilisûˋô ; -e ROS_MASTER_URI=http://XXX.YYY.ZZZ.74:11311 cette option n'est pas nouvelle, mais son contenu est diffûˋrent, nous spûˋcifions ici l'adresse IP de la carte Raspberry Pi du néud Master.
- Depuis un troisiû´me terminal, exûˋcuter la ligne de commande suivanteô :
2.
$ eval $(docker-machine env listener)
$ docker run --rm -it --privileged --net host -e WORKSPACE_NAME=workspacerpi -e ROS_IP=XXX.YYY.ZZZ.76 -e ROS_MASTER_URI=http://XXX.YYY.ZZZ.74:11311 --name listener -v /home/pirate/workspacerpi:/root/workspacerpi -w /root/workspacerpi ros:mykineticrpi rosrun beginner_tutorials listener.py
Mûˆme explication que prûˋcûˋdemment exceptûˋ pour cette nouvelle option --privileged utilisûˋe lors de la crûˋation du conteneur pour dûˋmarrer le néud Consommateur. --privileged permet d'autoriser le conteneur û accûˋder aux ûˋlûˋments matûˋriels du systû´me hûÇte, en l'occurrence les ports GPIO.
VIII. Conclusion et perspectives▲
Ce tutoriel a montrûˋ comment utiliser Docker pour le dûˋveloppement des applications basûˋes sur ROS (Robot Operating System). Plus prûˋcisûˋment avec Docker, nous avons vuô :
- comment enrichir l'image ROSô ;
- comment utiliser les outils fournis par ROS (rostopic) en exûˋcutant un conteneurô ;
- comment exûˋcuter une application ROS de plusieurs néuds en crûˋant plusieurs conteneurs ô¨ô û la mainô ô£ ou via l'outil d'orchestration docker-composeô ;
- comment dûˋmarrer des néuds qui possû´dent des interfaces graphiques via le dûˋport d'affichage (serveur X11)ô ;
- comment dûˋployer une application ROS sur plusieurs machines physiques via l'utilisation de docker-machineô ;
- comment autoriser un conteneur û accûˋder aux ûˋlûˋments matûˋriels du systû´me hûÇteô ;
- comment synchroniser son rûˋpertoire de travail sur plusieurs machines.
De nombreuses perspectives sont û explorerô :
- faciliter l'usage des lignes de commandes Docker via l'utilisation d'alias spûˋcifiques. Nous pourrions aller plus loin en masquant la complexitûˋ de Docker dans un environnement de dûˋveloppement prûˋconfigurûˋ et plus simple en rûˋduisant la longueur des lignes de commandesô ;
- effectuer de la cross-compilation pour des programmes ROS dûˋveloppûˋs en C++. Nous avons choisi la simplicitûˋ avec Python, mais dans le cas de C++ il y a une compilation û rûˋaliser en amont. Qu'en est-il lorsqu'il faut compiler sur une plateforme matûˋrielle diffûˋrente X86 vs ARMô ;
- utiliser Swarm de la famille Docker pour la crûˋation d'un clusterô ;
- gûˋrer le problû´me de la redondance de néuds par Docker.
Dans le prochain tutoriel consacrûˋ û ROS, nous nous intûˋresserons û la possibilitûˋ de dûˋvelopper des programmes ROS avec le langage Java. Nous montrerons que ROS une architecture oû¿ plusieurs programmes dûˋveloppûˋs dans des langages diffûˋrents peuvent communiquer. û ce titre, nous ferons communiquer des néuds ûˋcrits dans des langages diffûˋrents tels que Python et Java.